 Rekrutacja
Współprace
Kontakt
Projekty
Technologia
About
Rekrutacja
Współprace
Kontakt
Projekty
Technologia
About
Koło Naukowe SimLE to grupa utalentowanych i ambitnych studentów Politechniki Gdańskiej, których łączy przede wszystkim chęć tworzenia.
Wierzymy, że dzięki pracy w interdyscyplinarnych zespołach możemy sięgać gwiazd, podążać tam, gdzie nikt wcześniej nie dotarł, i na co dzień robić to, co dla naszych rówieśników może wydawać się niemożliwe.
W ramach naszego koła realizujemy programy i projekty, które łączą studentów z różnych kierunków, wydziałów, a nawet uczelni. Tworzymy przestrzeń, narzędzia i warunki – wszystko, co niezbędne, aby młodzi ludzie mogli doświadczać nauki w praktyce, rozwijać swoje pasje i odkrywać swój potencjał.

.jpg)

.jpg)
Program balonów stratosferycznych

Program budowy rakiet sondujących
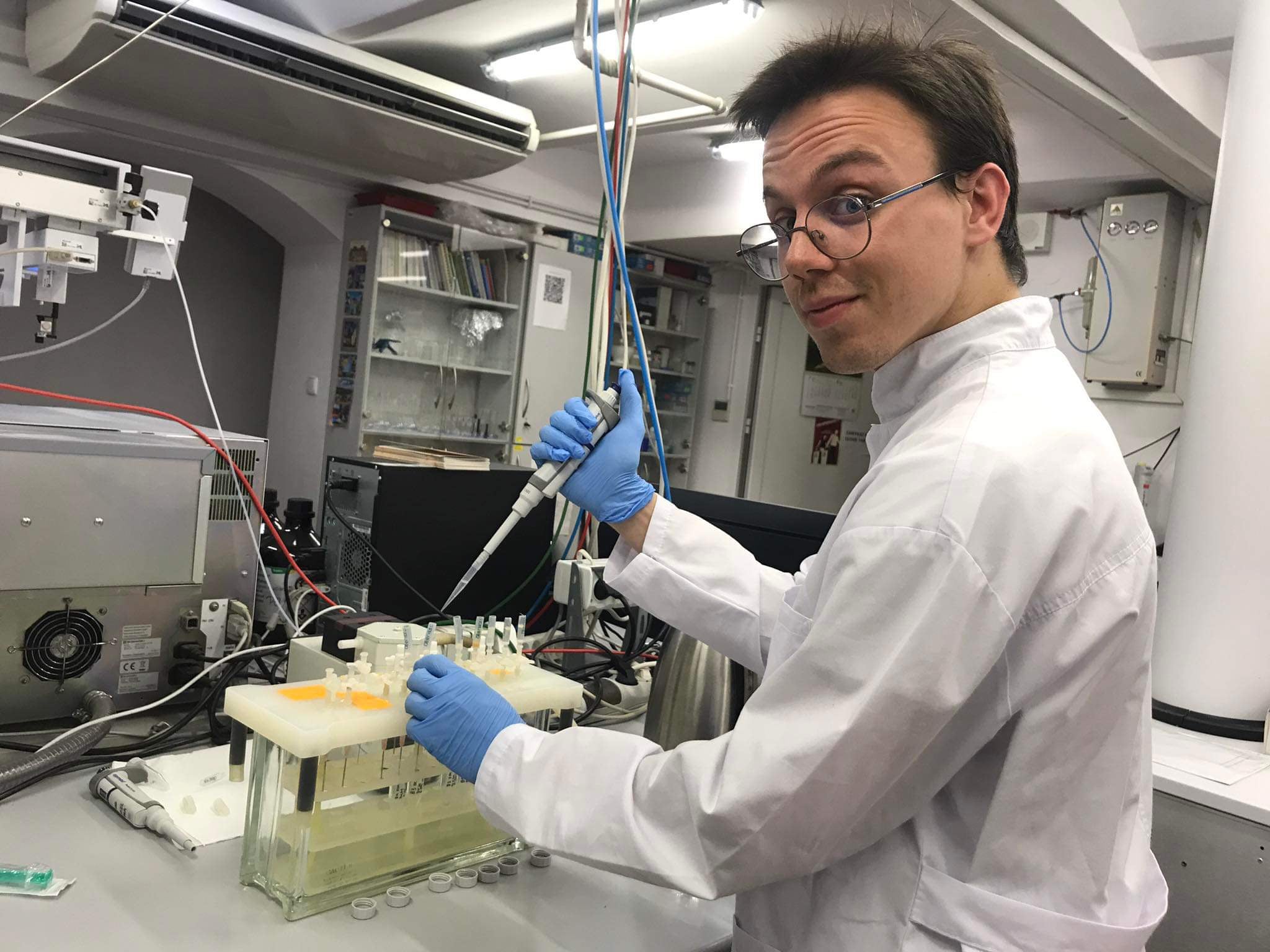
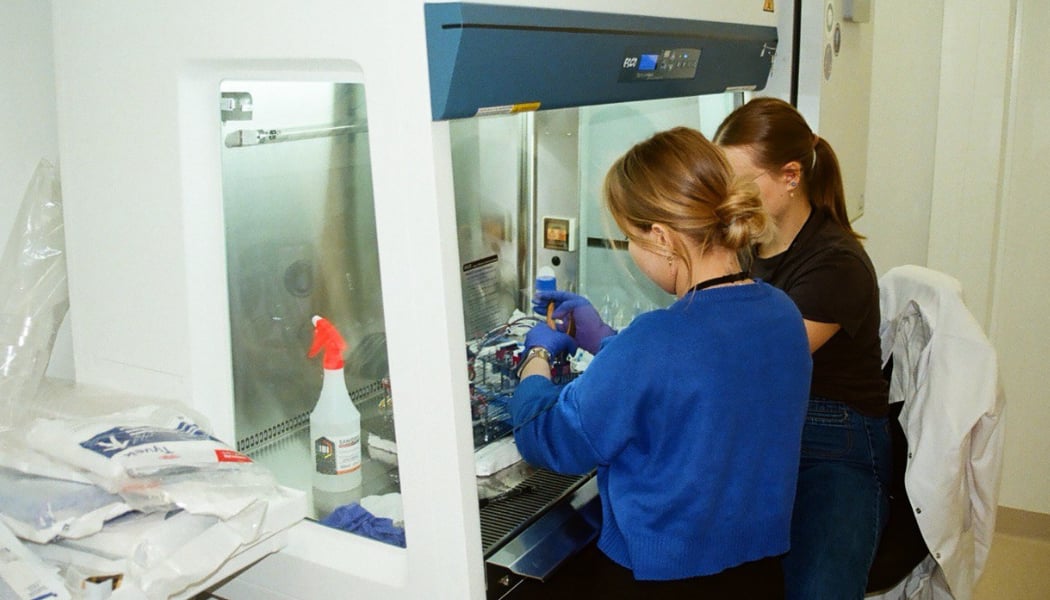
Dział eksperymentów naukowych
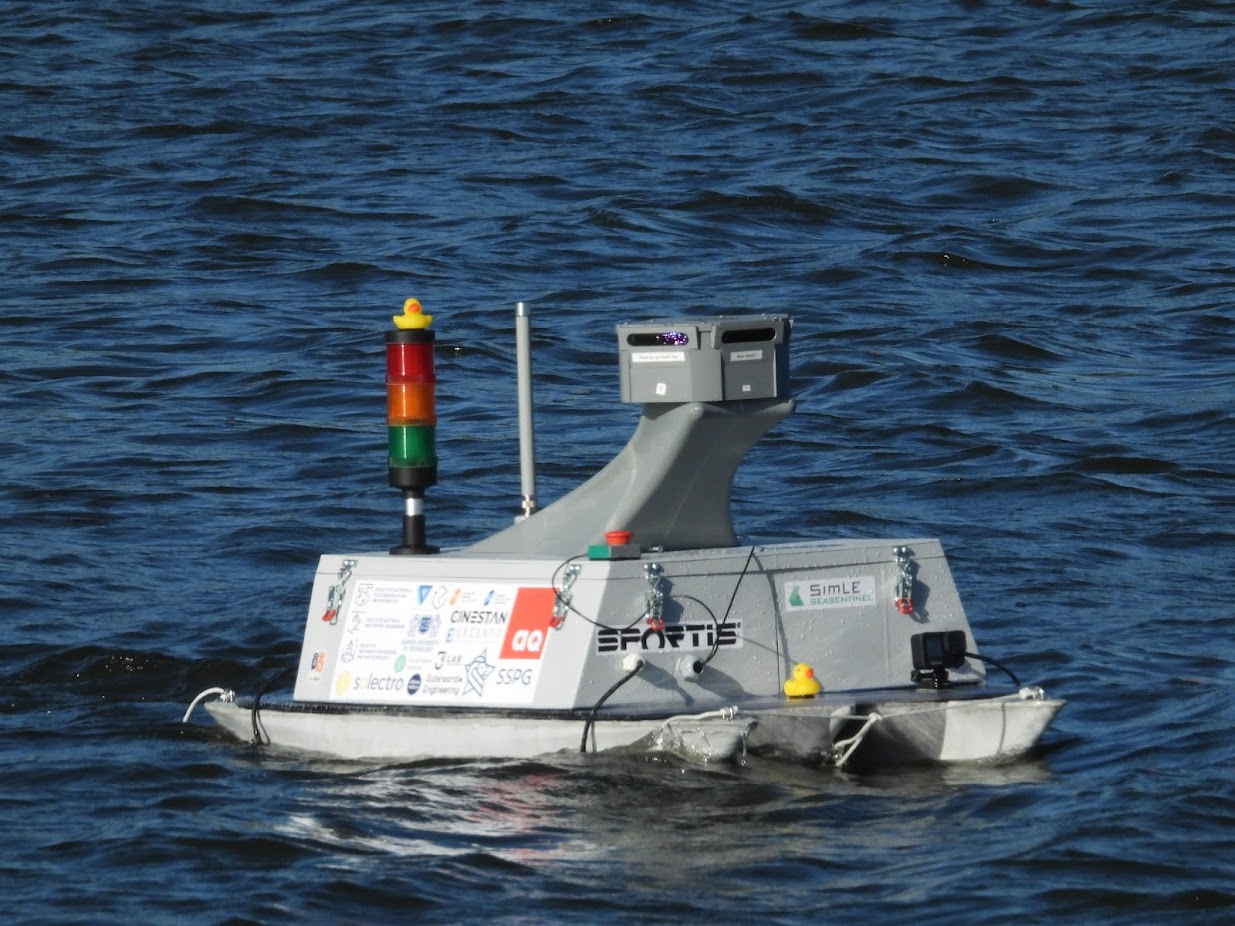
Program budowy autonomicznych pojazdów nawodnych

Program budowy dronów autonomicznych

Projekt budowy łazika marsjańskiego

Promocja, logistyka, finanse
Zapisz się, aby otrzymywać informacje o naszych misjach, przełomach technologicznych oraz być ich częścią.
Dołącz już dziś!