RoboBoat
Every year, RoboBoat hosts a global
competition inviting undergraduate
students to design and construct
compact Autonomous Surface Vehicles
(ASVs) capable of tackling diverse tasks
mirroring actual challenges encountered
in the maritime sector.
Participants not only engage in the
technical aspects of designing ASVs
but also undertake responsibilities such
as fundraising, documenting project
developments, and coordinating
outreach efforts. Our objective is
to leverage the knowledge gained
from the competition to contribute
meaningfully to our community.

ASV “Rybitwa"
As of today we are in the process
of developing our next-gen system called ASV "Rybitwa". Why "system" instead of "vehicle"? Because in reality in SeaSentinel we do not just build boats. We create entire systems.
Apart from just building vehicles we write and train algorithms that are the backbone of all autonomy. We build Operator Control Stations. We develop procedures that allow us to effectively operate our systems. We create
and provide logistical support environment for our operations.
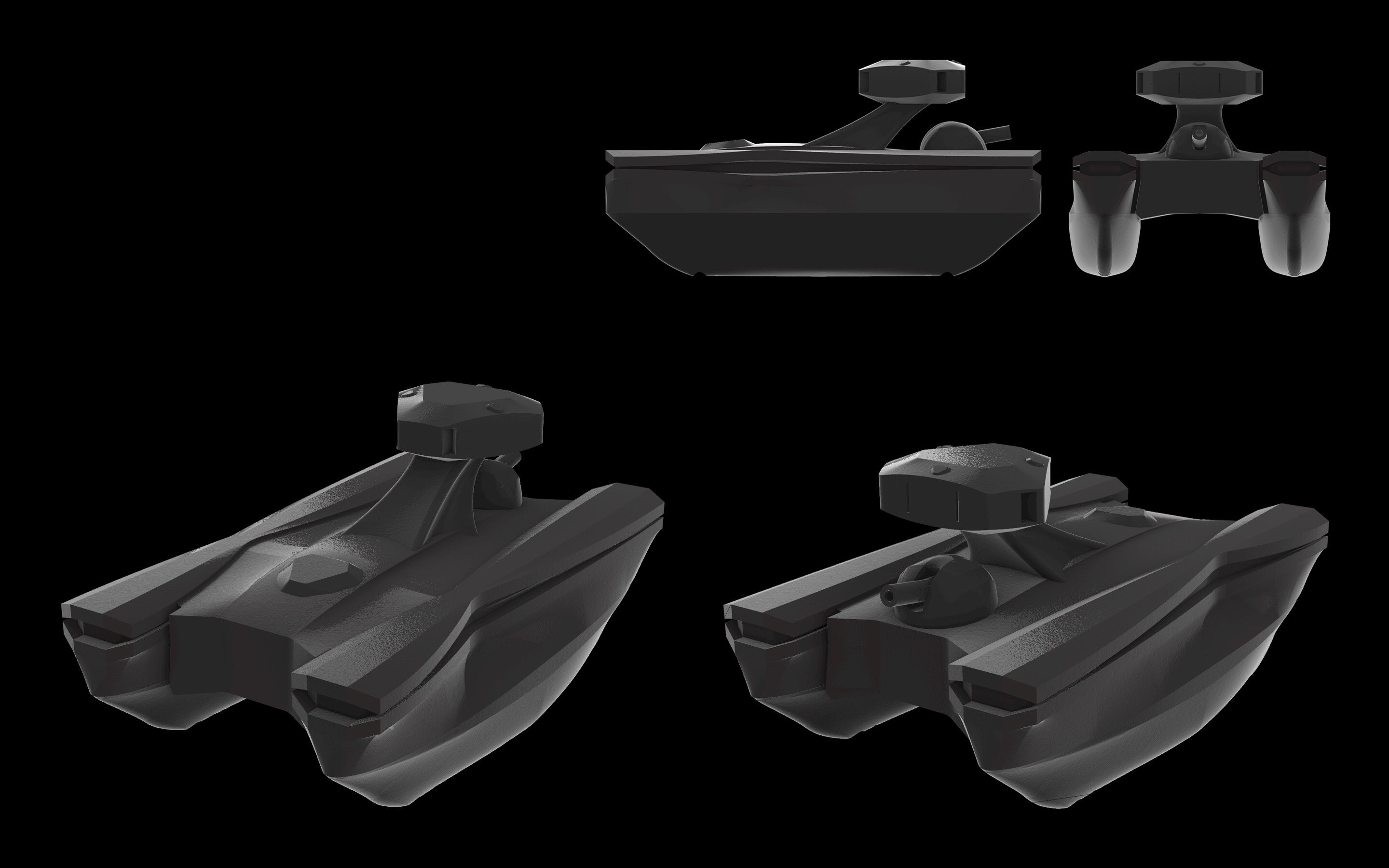
When it comes to the characteristics
of the boat itself then "Rybitwa" will
be a catamaran with omni-directional propulsion, modular design and vision based autonomy, just like "Perkoz". What is new then? Well... everything else. We greatly improved, among other things, our algorithms, completely redesigned the shape of our hull, improved our communications
and electromagnetic design. Additionally, we developed new task modules and subsystems.


